Bitcask存储引擎
背景介绍
为了解决分布式数据库Riak高性能、低延迟的本地存储需求,Riak设计了Bitcask存储引擎,能够快速读写、处理大数据集、具备容灾能力且易于备份和恢复。Bitcask存储引擎的特点有:
- 高性能读写:
- 提供低读写延迟和高随机写吞吐率。
- 在重访问负载下保持可预测的行为。
- 大规模数据处理:
- 处理远超内存的数据集而不降低性能。
- 确保在大数据量下的高效运行和稳定性。
- 崩溃恢复与数据完整性:
- 系统崩溃友好,支持快速恢复且不丢失数据。
- 提供简便的备份和恢复机制,确保数据安全。
- 简洁性与易维护性:
- 代码格式和数据结构设计简洁易懂,便于维护和扩展。
存储结构
Bitcask架构简单,主要由:内存中键目录(keydir)和数据文件(data file)组成,其中数据文件包括活跃数据文件(active data file)和旧数据文件(older data file)。
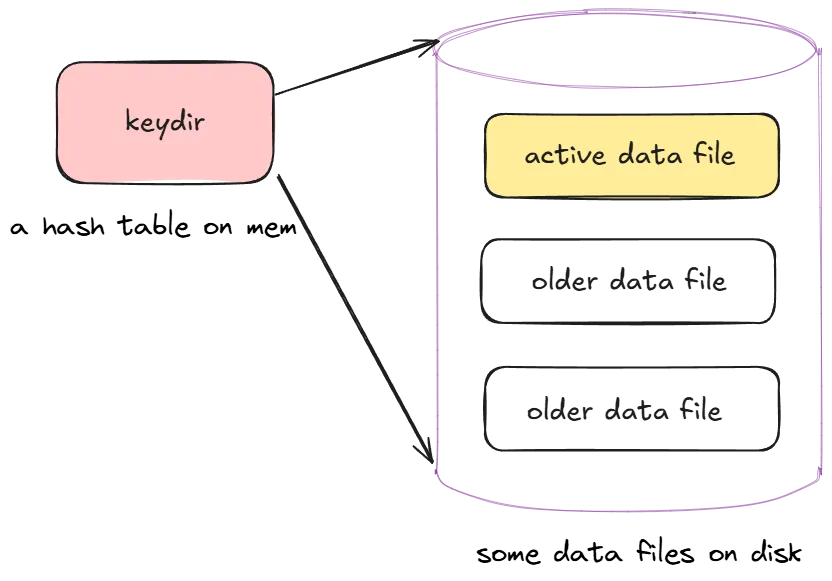
数据文件
数据文件存在于磁盘上,组成了一个Bitcask实例目录,同一时刻只允许一个操作系统进程对其进行写操作。任何时刻,目录中只有一个文件是“活动”的,用于写入新数据,并且只通过追加方式写入。当现有活跃文件达到一定大小阈值时,会被关闭并创建一个新的活跃文件。一旦文件被关闭,它就成为不可变的,永远不会再被打开进行写操作。
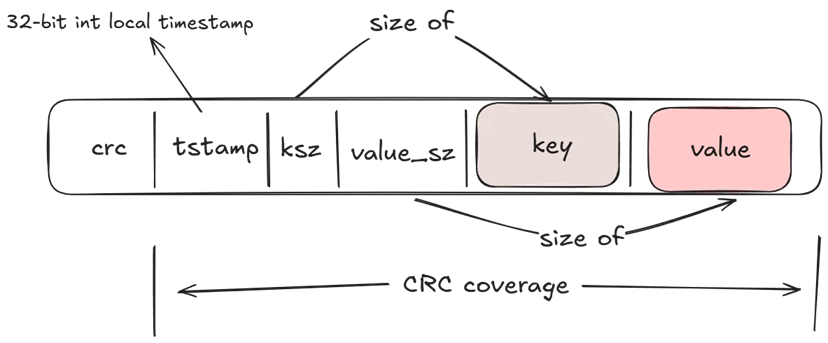
每个数据文件都由若干个键值对条目组成。每个键值对条目格式简单,包括时间戳、键长度、值长度、键和值。
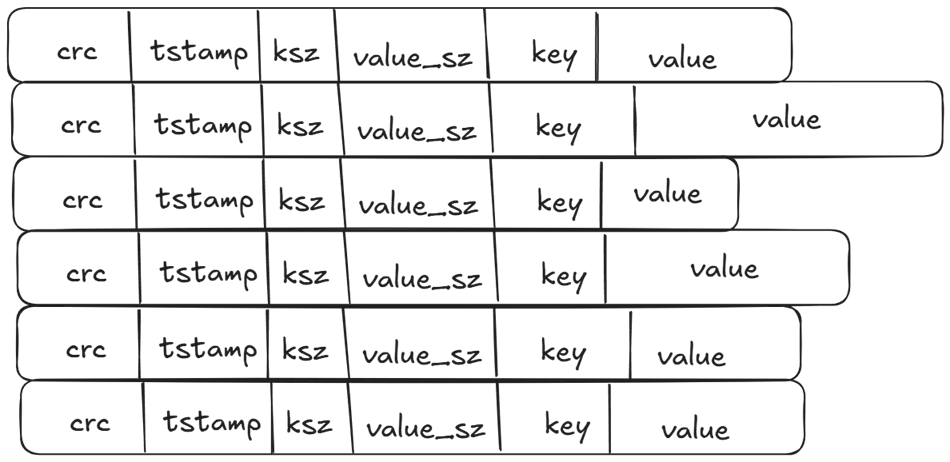
每次写入时,根据待插入的键值对数据生成一个新的条目,将条目追加到活动文件中,所以数据文件其实是这些条目的线性序列。
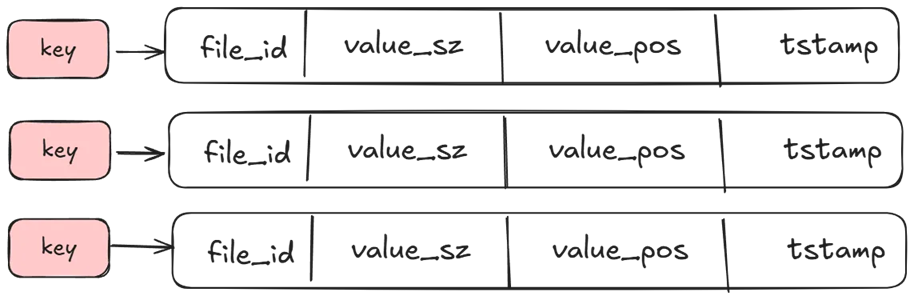
键目录
键目录是位于内存中的一张哈希表,存着所有数据文件每个键的位置信息,包括该键最近写入的文件id、值大小、偏移量和时间戳。
机制设计
Bitcask常见操作有打开数据实例、读写数据、合并旧数据文件以及备份恢复数据。
打开数据实例
Bitcask打开数据实例的流程如下。
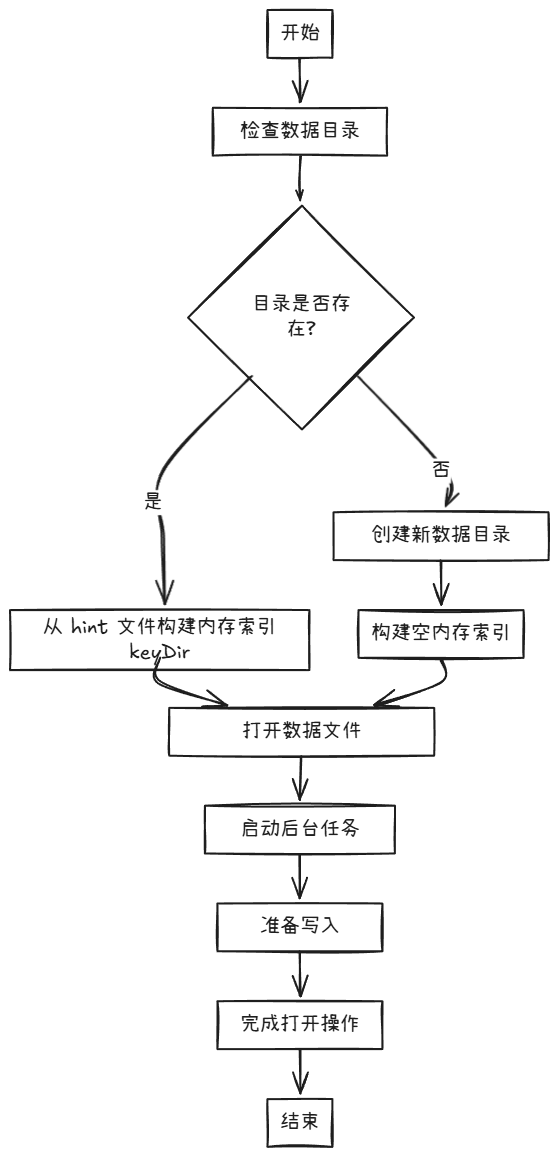
初始化 BitCask 实例:
- 检查要打开的数据目录是否存在,不存在则创建新的数据目录,否则打开当前数据目录。
加载键目录(Keydir):
- 初始化内存中的必要组件-键目录(keydir),用于快速查找键值对
- 提示文件是 Bitcask 用于加速重启时键目录加载的辅助文件,存储了键的元数据,如果有提示文件存在,则会优先从提示文件中加载键目录,这样可以大大减少重启时的加载时间
打开数据文件:
- 打开所有需要的数据文件,包括当前的活动文件和历史文件。对于每个文件,Bitcask 会检查文件的完整性,确保没有损坏。
启动后台任务:
- 启动必要的后台任务,如定期合并(merge)旧的数据文件,以减少磁盘空间的使用。
准备写入:
- 初始化写入缓冲区,准备接受新的写入请求。如果需要,创建一个新的数据文件,作为当前的活动写入文件。
完成打开:
- 完成所有初始化步骤后,Bitcask 实例进入正常工作状态,可以接受读写请求。
读写流程
Bitcask读写流程如下图所示。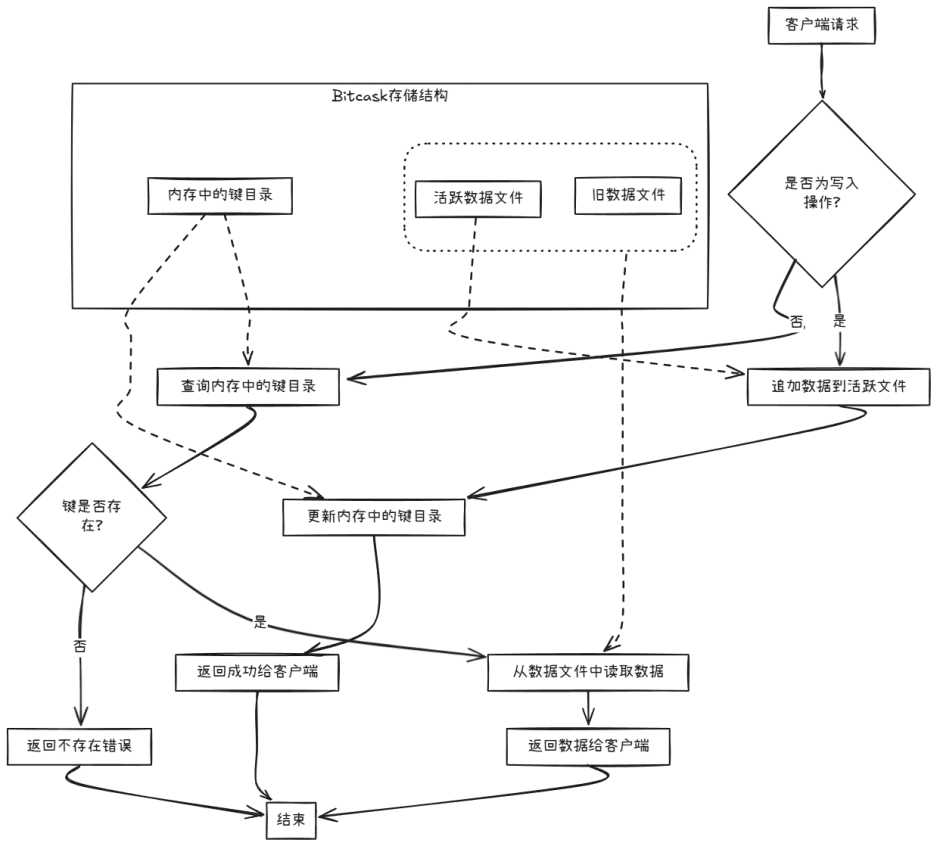
读操作
Bitcask读操作的流程如下:
- 查找键值:首先,Bitcask 会在内存中的
keydir中查找给定的键; - 读取数据:根据
keydir中查找到的信息(文件 ID、位置和大小),直接从磁盘上的数据文件中读取数据。由于keydir中已经包含了数据的准确位置,因此读取操作只需要一次磁盘寻道; - 利用操作系统缓存:在许多情况下,操作系统的文件系统读取缓存会使得这一操作比预期的更快。
所以Bitcask的读取操作非常高效,只需要一次磁盘寻道,并且可以利用操作系统的缓存来加速读取过程。
写操作
Bitcask写操作的流程如下:
- 打开 Bitcask 实例:调用
bitcask:open(DirectoryName, Opts)打开或创建一个 Bitcask 数据存储。如果目录已有实例被打开,新进程将共享该实例的keydir; - 写入数据:通过
bitcask:put(BitCaskHandle, Key, Value)将键值对追加写入当前的“活跃文件”中; - 更新 keydir:写入完成后,内存中的
keydir被更新,以记录最新数据的位置和大小; - 同步数据(可选):如果设置了
sync_on_put选项,写入后会同步数据到磁盘,确保持久化; - 关闭实例(可选):完成所有写入操作后,可以调用
bitcask:close(BitCaskHandle)关闭数据存储,并确保数据被完全写入磁盘。
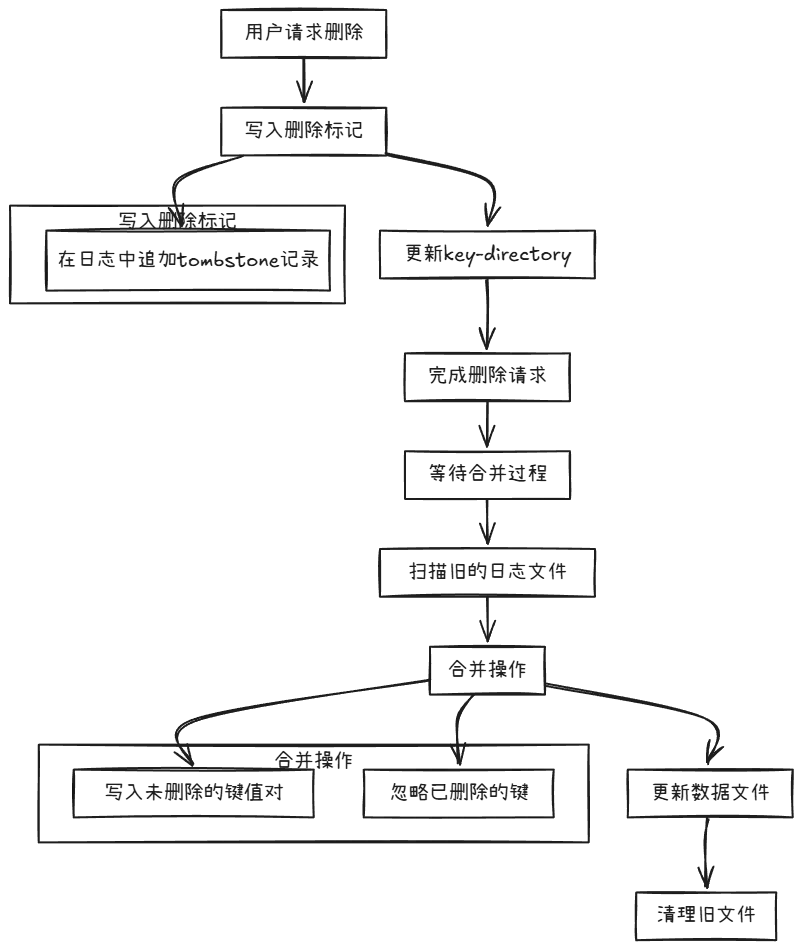
删除是一种特殊的写操作。删除操作流程如下:
用户请求删除
- 用户发起删除某个键的请求。
写入删除标记
- 在日志中追加一条记录,表示要删除该键。
- 更新
key-directory(键目录),标记该键为已删除。
完成删除请求
- 对用户返回删除成功的响应。
等待合并过程
- 定期或在合适的时机,执行后台的合并与清理过程。
- 在合并过程中,扫描旧的日志文件。
合并操作
- 将未被删除的键值对与新的键值对写入新的合并文件。
- 忽略已标记为删除的键。
更新数据文件
- 更新存储路径,替换旧的日志文件为新的合并文件。
清理旧文件
- 删除旧的日志文件,释放磁盘空间。
合并过程
在合并过程中,Bitcask 通过以下步骤生成一组新的数据文件,并丢弃旧的、过时的数据条目:
- 读取非活跃文件 :Bitcask 首先会读取所有非活跃文件(即旧文件)。这些文件包含了所有历史写入的数据条目。
- 构建键的最新版本映射 :Bitcask 会遍历每个非活跃文件中的所有数据条目,并构建一个映射(map),该映射记录了每个键的最新版本。这个映射会覆盖旧版本的数据条目。
- 写入新数据文件 :在构建了键的最新版本映射后,Bitcask 会打开一个新的数据文件(通常称为“合并文件”或“新文件”),并将映射中的所有最新版本的数据条目写入这个新文件。
- 丢弃旧数据条目 :由于新文件中已经包含了所有键的最新版本,旧的、过时的数据条目在写入新文件后就不再需要了。因此,这些旧数据条目会被丢弃。
- 更新
keydir:在合并过程中,Bitcask 会更新内存中的keydir,使其指向新文件中的最新数据条目。 - 删除旧文件 :合并完成后,Bitcask 会删除旧的非活跃文件,因为这些文件中的数据已经被合并到新文件中。
- 创建提示文件 :为了加速未来的启动时间,Bitcask 会为新文件创建提示文件。提示文件记录了每个键在新文件中的位置和大小,但不包含实际的值。
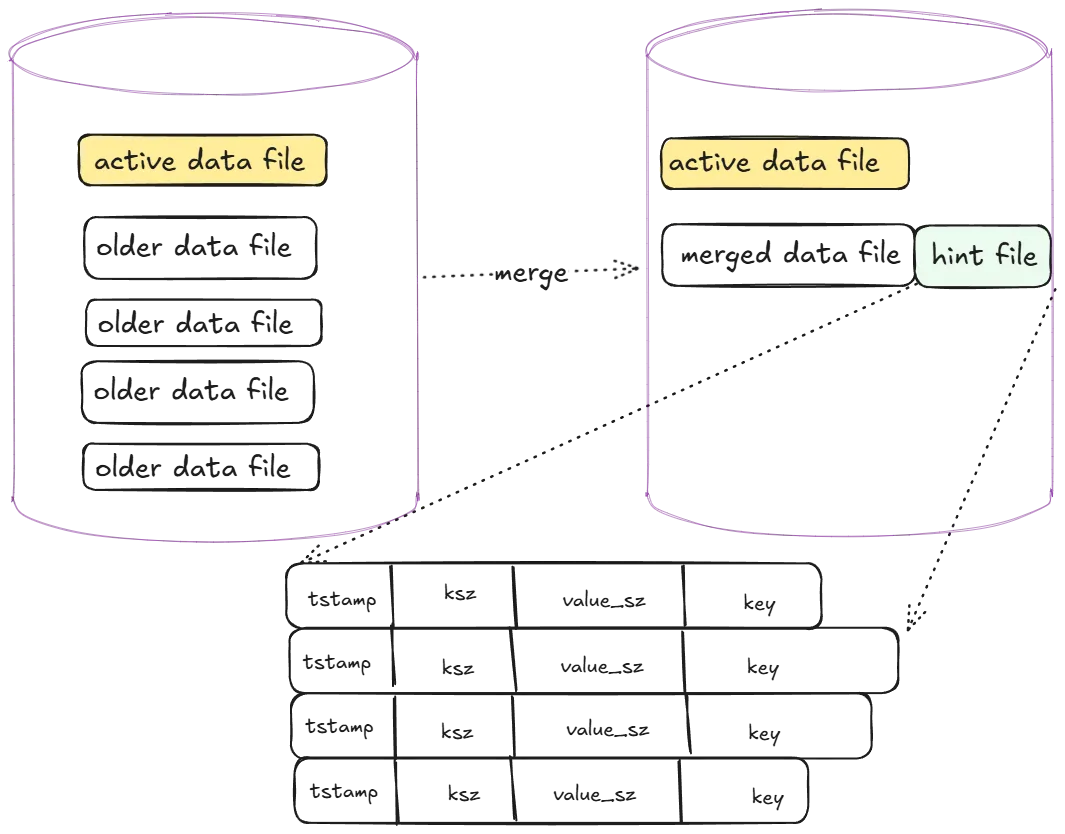
总结来说,合并过程通过读取所有非活跃文件,构建键的最新版本映射,并将这些最新版本的数据条目写入新文件,从而丢弃旧的、过时的数据条目。这个过程有效地减少了存储空间的占用,并通过生成的提示文件加速了 Bitcask 的启动时间。
备份与恢复过程
完善中
与lsm-tree对比
Bitcask 和 LSM-Tree(Log-Structured Merge-Tree)是两种常见的键值存储引擎,它们各自有不同的优缺点,适用于不同的应用场景。以下是它们的主要优缺点对比:
Bitcask
优点:
- 简单高效 :Bitcask 模型非常简单,易于理解和实现。它基于日志结构,数据写入速度非常快,因为写操作是顺序的,减少了磁盘寻道时间。
- 快速读取 :由于 Bitcask 维护了一个内存中的哈希表(称为“键目录”),读取操作非常快,通常只需要一次内存查找。
- 低延迟写入 :写入操作是直接追加到日志文件中,不需要复杂的合并操作,因此写入延迟较低。
- 易于备份和恢复 :Bitcask 的数据文件是顺序的,易于备份和恢复。
缺点:
- 内存占用 :Bitcask 需要维护一个内存中的哈希表来存储键和数据文件的偏移量,这会占用大量内存,尤其是在键数量巨大的情况下。
- 磁盘空间利用率 :Bitcask 不支持原地更新,旧数据不会被覆盖,因此随着时间的推移,磁盘空间利用率会逐渐降低。
- 不支持范围查询 :Bitcask 是基于键值对的存储,不支持高效的范围查询。
LSM-Tree
优点:
- 高写入吞吐量 :LSM-Tree 通过将写操作先写入内存中的 MemTable,然后定期刷新到磁盘上的 SSTable(Sorted String Table),实现了高写入吞吐量。
- 高效的磁盘空间利用 :LSM-Tree 通过合并和压缩操作,可以有效地回收旧数据占用的磁盘空间,提高磁盘利用率。
- 支持范围查询 :由于数据是按顺序存储在 SSTable 中,LSM-Tree 支持高效的范围查询。
- 可扩展性 :LSM-Tree 设计支持水平扩展,适合大规模数据存储和高并发写入场景。
缺点:
- 写放大问题 :LSM-Tree 的写入操作可能会导致写放大问题,即一次写操作可能会触发多次磁盘写入(例如,合并和压缩操作)。
- 读取延迟较高 :读取操作可能需要合并多个 SSTable 中的数据,尤其是在数据量较大时,读取延迟较高。
- 复杂性较高 :LSM-Tree 的实现和管理相对复杂,涉及到多个组件(如 MemTable、SSTable、Bloom Filter 等)的协调和管理。
总结
- Bitcask 适合于写入频繁、读取频繁但不需要范围查询的场景,尤其是在内存充足的情况下。
- LSM-Tree 适合于需要高写入吞吐量、支持范围查询、并且可以容忍一定读取延迟的场景。